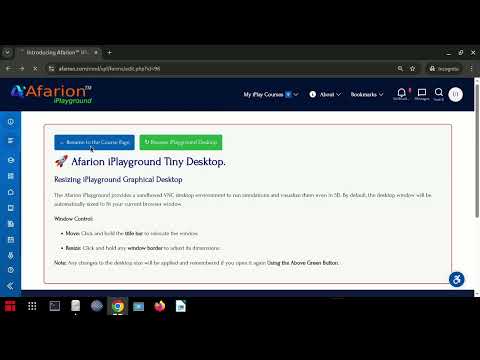
Afarion iPlayground
You can run your ns-3 simulation directly in your web browser by enrolling in any Afarion iPlayground ns-3 Course.

Articles related with 3D Network Simulations

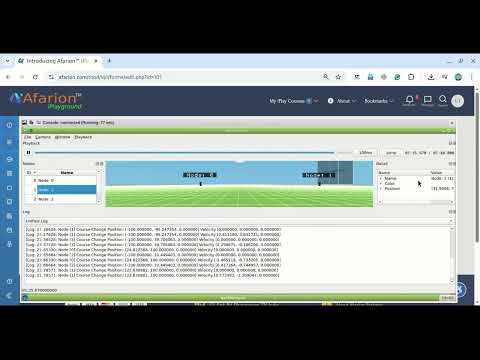
NetSimulyzer 3D Visualization Tool In fact, ‘NetSimulyzer’ consists of two parts. One is the actual 3D visualization tool and the other is an ns-3 companion module. Both are named as […]
3D Network Simulations, ns-3, ns-3 Installation, Research, Restricted Articles
NetSimulyzer ns-3 Add-on Module. In fact, ‘NetSimulyzer’ consists of two parts. One is the actual 3D visualization tool and the other is an ns-3 companion module. Both are named as […]
3D Network Simulations, ns-3, ns-3 Installation, Research, Restricted Articles
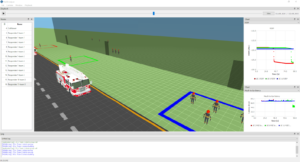
Paparazzi Mobility Model It is a mobility model to simulate the movement of autonomous vehicles, such as drones or UAVs (unmanned aerial vehicles), in a virtual environment. It allows users […]
3D Network Simulations, ns-3, ns-3 Installation, Research, Restricted Articles
Paparazzi Mobility Model It is a mobility model to simulate the movement of autonomous vehicles, such as drones or UAVs (unmanned aerial vehicles), in a virtual environment. It allows users […]
3D Network Simulations, ns-3, ns-3 Installation, Research, Restricted Articles
There are different ways to use a Linux application on windows. The popular methods are: Using Cygwin Environment Using MinGW/MinGW-64 Environment Using MSYS2 Environment Using Virtual Machines such as VirtualBox Using […]
3D Network Simulations, Articles for Beginners, ns-3, ns-3 Installation, Research, Restricted Articles
SUMO(Simulation of Urban MObility) SUMO is an open-source, highly portable, microscopic and continuous multi-modal traffic simulation package designed to handle large networks. SUMO allows modelling of intermodal traffic systems including […]
3D Network Simulations, Articles for Beginners, ns-2, Omnet++, Restricted Articles, SUMO
The Windows Subsystem for Linux (WSL): The Windows Subsystem for Linux (WSL) lets developers run a GNU/Linux environment — including most command-line tools, utilities, and applications — directly on Windows, […]
3D Network Simulations, Articles for Beginners, ns-3, ns-3 Installation, Research, Restricted Articles
The Windows Subsystem for Linux (WSL): The Windows Subsystem for Linux (WSL) lets developers run a GNU/Linux environment — including most command-line tools, utilities, and applications — directly on Windows, […]
3D Network Simulations, Articles for Beginners, ns-3, ns-3 Installation, Research, Unrestricted Articles
Even though the latest Linux distributions are user-friendly, students and scholars tend to use Windows since they are only familiar with Windows operating system and will find it difficult to […]
3D Network Simulations, Articles for Beginners, Experiments on Ns2, ns-2, Ns-2 Installation, ns-3, ns-3 Installation, Omnet++, Unrestricted Articles
Generally, we can do FANET/UAV/DRONE simulations as mentioned in the following article : Simulation of UAV based Search and Rescue Scenario with ns-3 FlyNetSim is somewhat different from the […]
3D Network Simulations, ns-3, ns-3 Installation, Research, Unrestricted Articles
Some of the old ns-2 versions and even some very old ns-3 versions can only be installed on an older Linux variant because of the gcc and gcc-lib compatibility issues. […]
3D Network Simulations, Experiments on Ns2, ns-2, Ns-2 Installation, Patching Ns-2, Research, Restricted Articles
Even though I am not civilized enough to say “wish messages” to people, let me try to deliver a “Happy New Year” wish message to the members of ns-3 user […]
3D Network Simulations, ns-2, ns-3, Restricted Articles
SRCM – Semi Random Circular Mobility Model of ns-3 While trying to raise my own merge request for my Simple Circle Mobility Model, on GitLab, I saw another merge request […]
3D Network Simulations, ns-3, ns-3 Installation, Research, Restricted Articles
In this post, I want to share my first experience on ‘Raising a simple merge request at GitLab’ at https://gitlab.com/nsnam/ns-3-dev/-/merge_requests You may find that specific request at – A Simple CircleMobilityModel […]
3D Network Simulations, ns-3, Research, Unrestricted Articles
Millicar is an ns-3 module for the simulation of Vehicle-to-Vehicle networks operating at mmWaves[2]. It was developed by SIGNET Lab, University of Padova. The following figure from [1] shows the […]
3D Network Simulations, ns-3, ns-3 Installation, Research, Restricted ArticlesYou can run your ns-3 simulation directly in your web browser by enrolling in any Afarion iPlayground ns-3 Course.
 Take Me to Afarion ns-3 iPlayground
Take Me to Afarion ns-3 iPlayground